I can’t seem to find any information on the hardware requirements for Scanything. I have a 4x4 router table (CNC Router Parts pro4848). I am using Mach3 with the Warp9 ESS to run the table. The ESS/controller connects to the computer using an ethernet cable. The computer is Windows 7 - 64 bit. I have downloaded Scanything V1.0.16 from the Sheetcam website and followed the instructions for Mach3:
"Instructions for installation with Mach3
Download and install Scanything then run Mach3 and go to Config->Config plugins. Enable the SheetCamRemote plugin and restart Mach3. To test the connection, enable the drives on your machine and check if the jog buttons in Scanything work. "
Does a video camera need to be connected in order to test the connection by enabling the drives and checking to make sure the jog buttons work?
Since I can run Mach3 Mill on my desktop office computer (not the computer out in the shop that I use to run the cnc) and I have downloaded and installed Scanything onto this computer, should I be able to test the jog buttons without being connected to the cnc? I can use the keyboard to jog in Mach3 Mill, and the display shows the movement on the readouts without any hardware being connected.
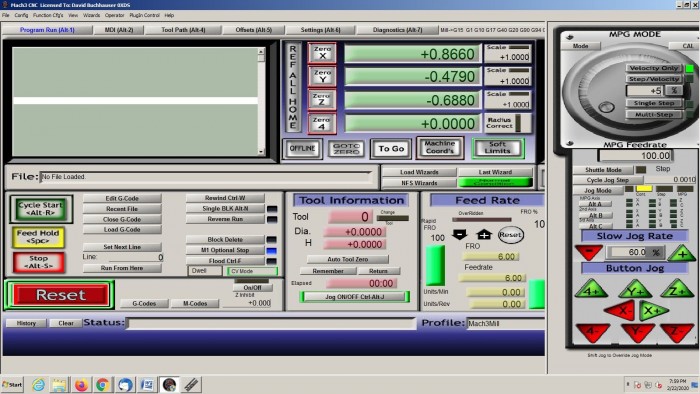
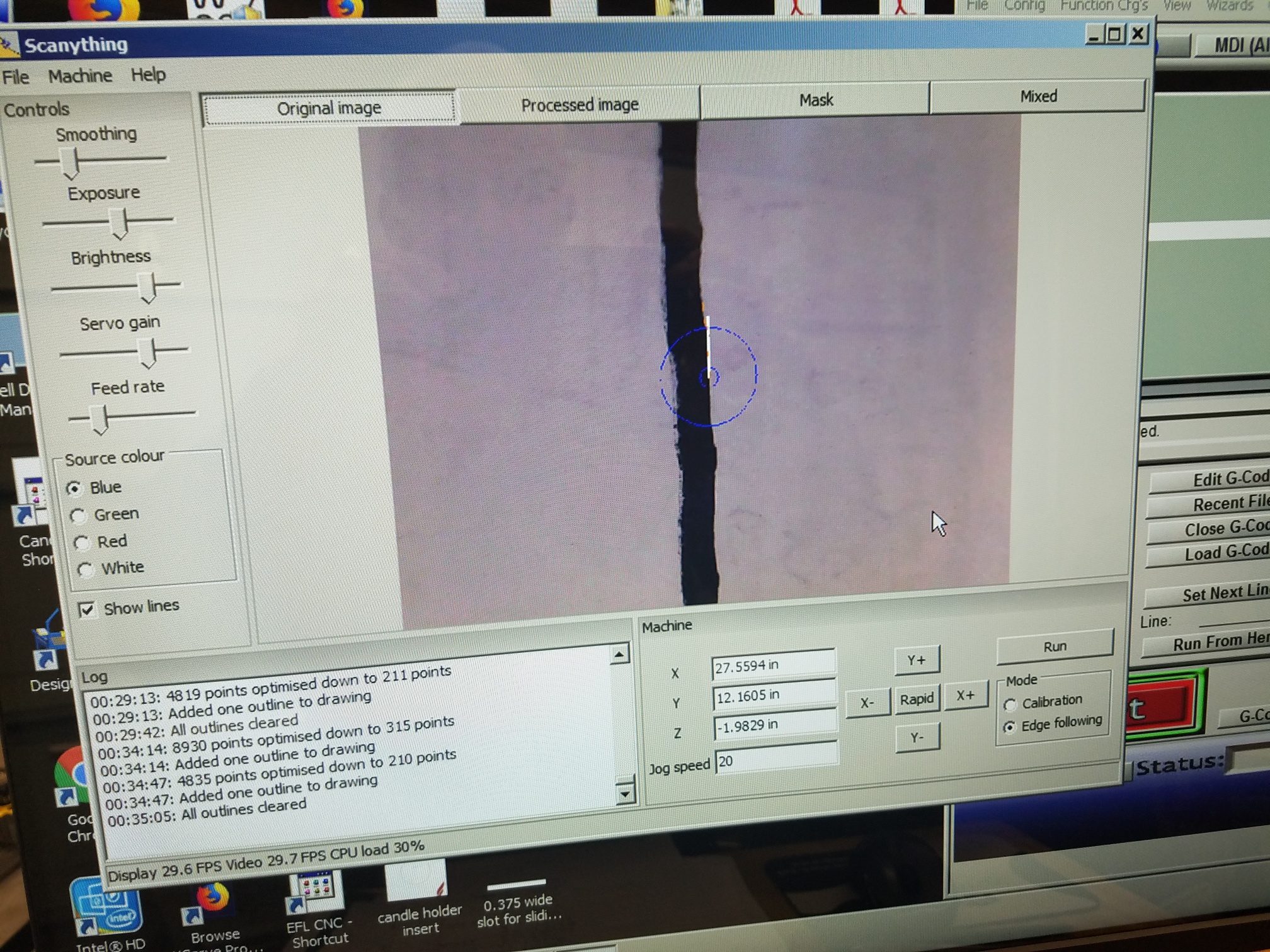
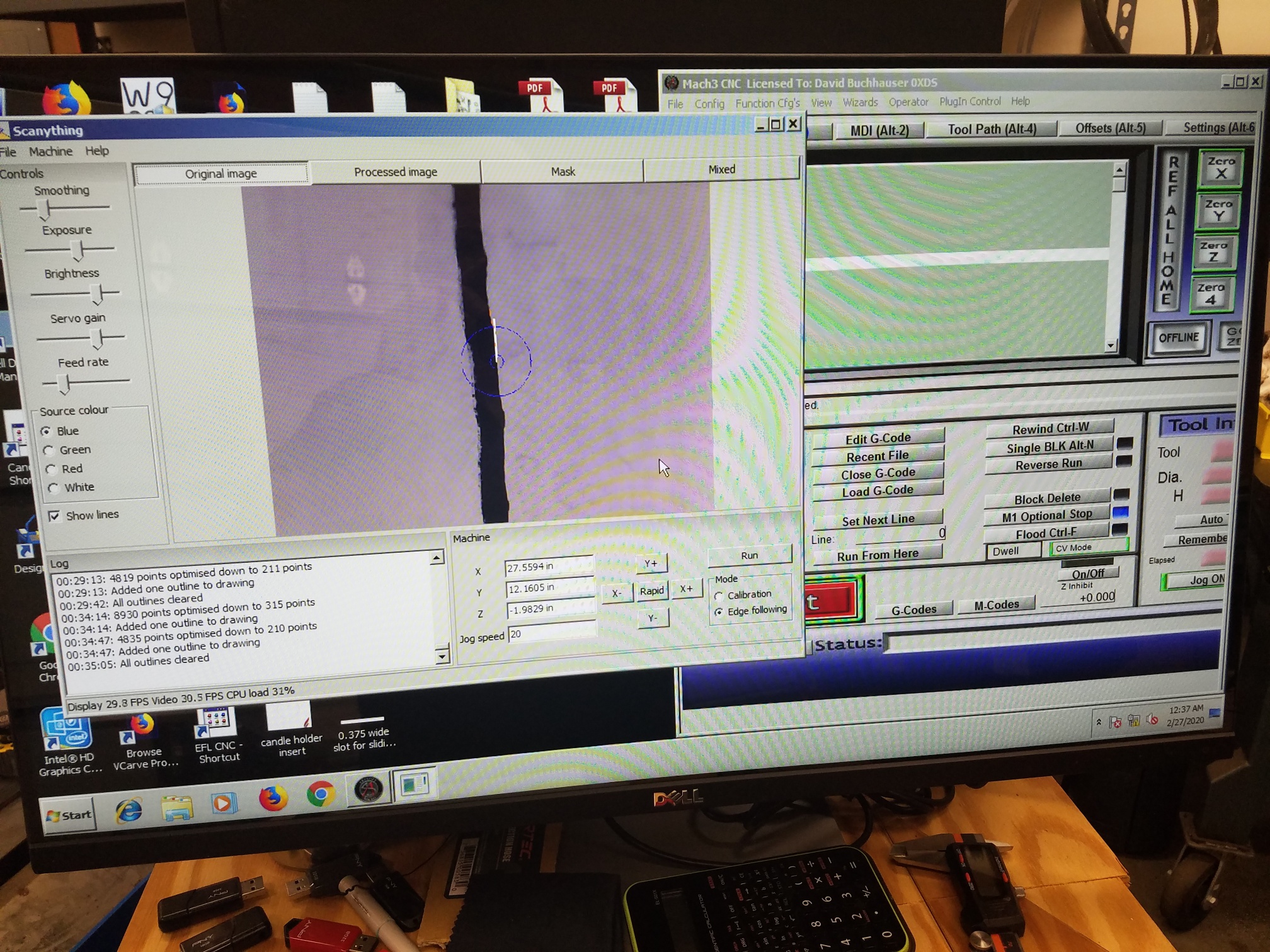
When I open Scanything, the jog buttons are not active.

I receive the following error messages when starting Scanything. I do have he plugin (SheetCamRemote.dll) installed in the C:/Mach3/plugins folder.
Any ideas what I am doing wrong here?
22:23:26: Checking for updates…
22:23:26: Not connected to machine
22:23:26: Error: file ‘’, line 1: ‘=’ expected.
22:23:26: Error: file ‘’, line 2: ‘=’ expected.
22:23:26: Error: file ‘’, line 3: ‘=’ expected.
22:23:26: Error: file ‘’, line 4: ‘=’ expected.
22:23:26: Error: file ‘’, line 5: ‘=’ expected.
22:23:26: Warning: unexpected " at position 89 in ‘"https://www.sheetcam.com/Scanything/Update/Windows.ini?id=&ver=1.0.16&os=Windows">here.</p>’.
22:23:26: Error: file ‘’, line 7: ‘=’ expected.
22:23:26: Connected to update server
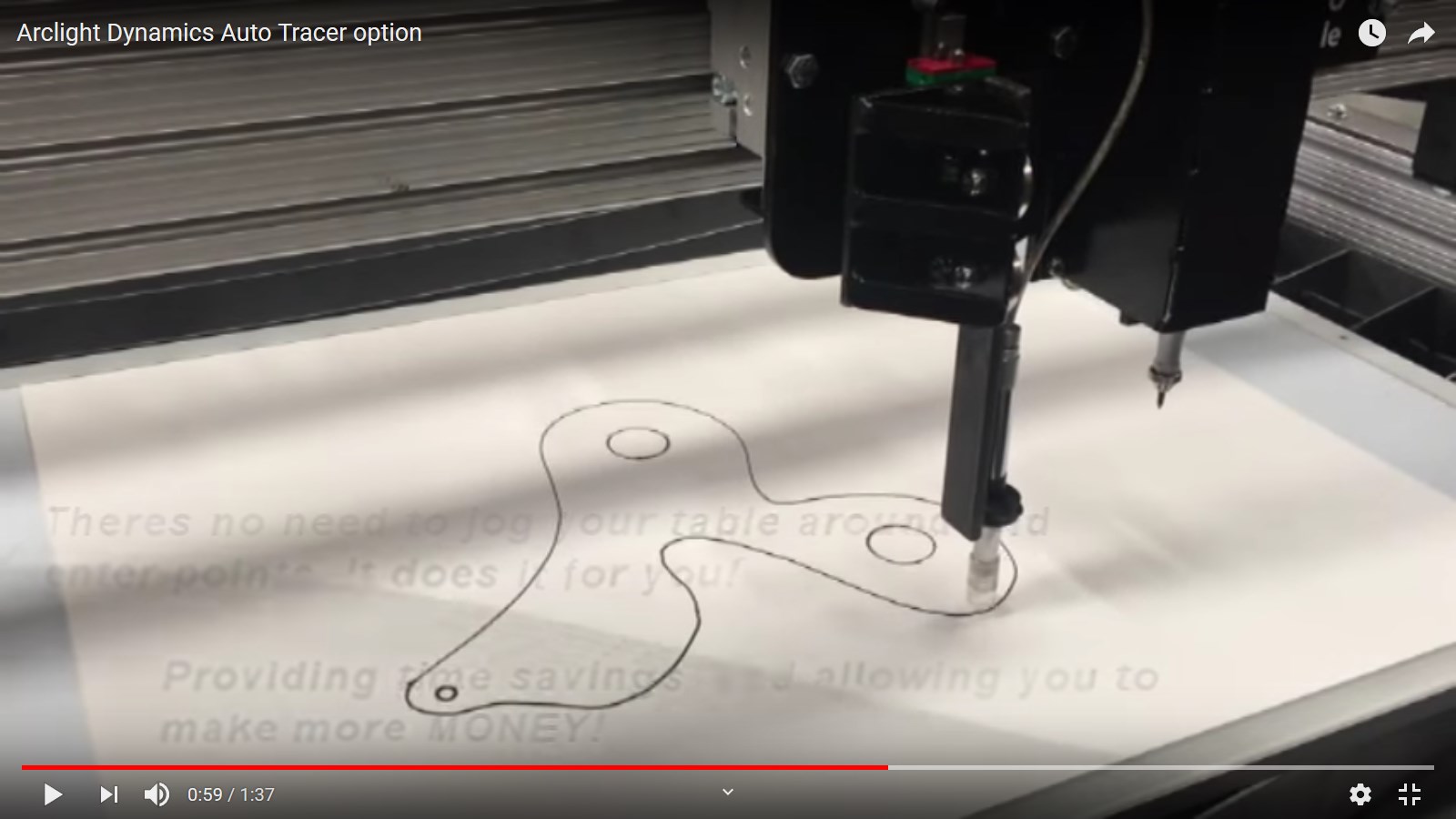
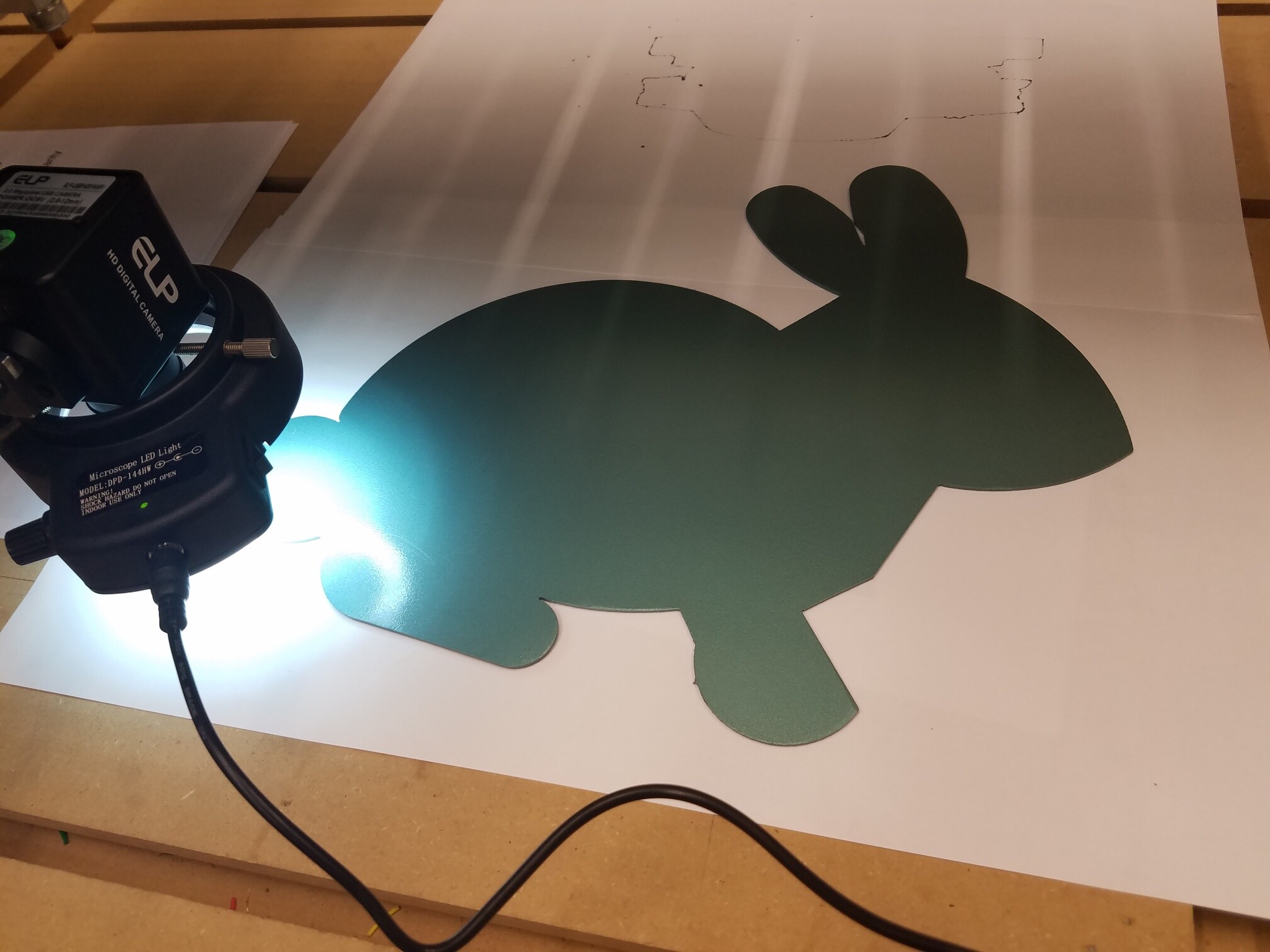
I have not yet purchased the video camera. The Scanything description says: “It is designed to work with a USB video camera”
In reading thru some of the other posts, they talk about using a parallel port for the camera, and that there might be a limitation of using Windows 32 bit operating system. Also - do I need a registration key in order to use Scanything?
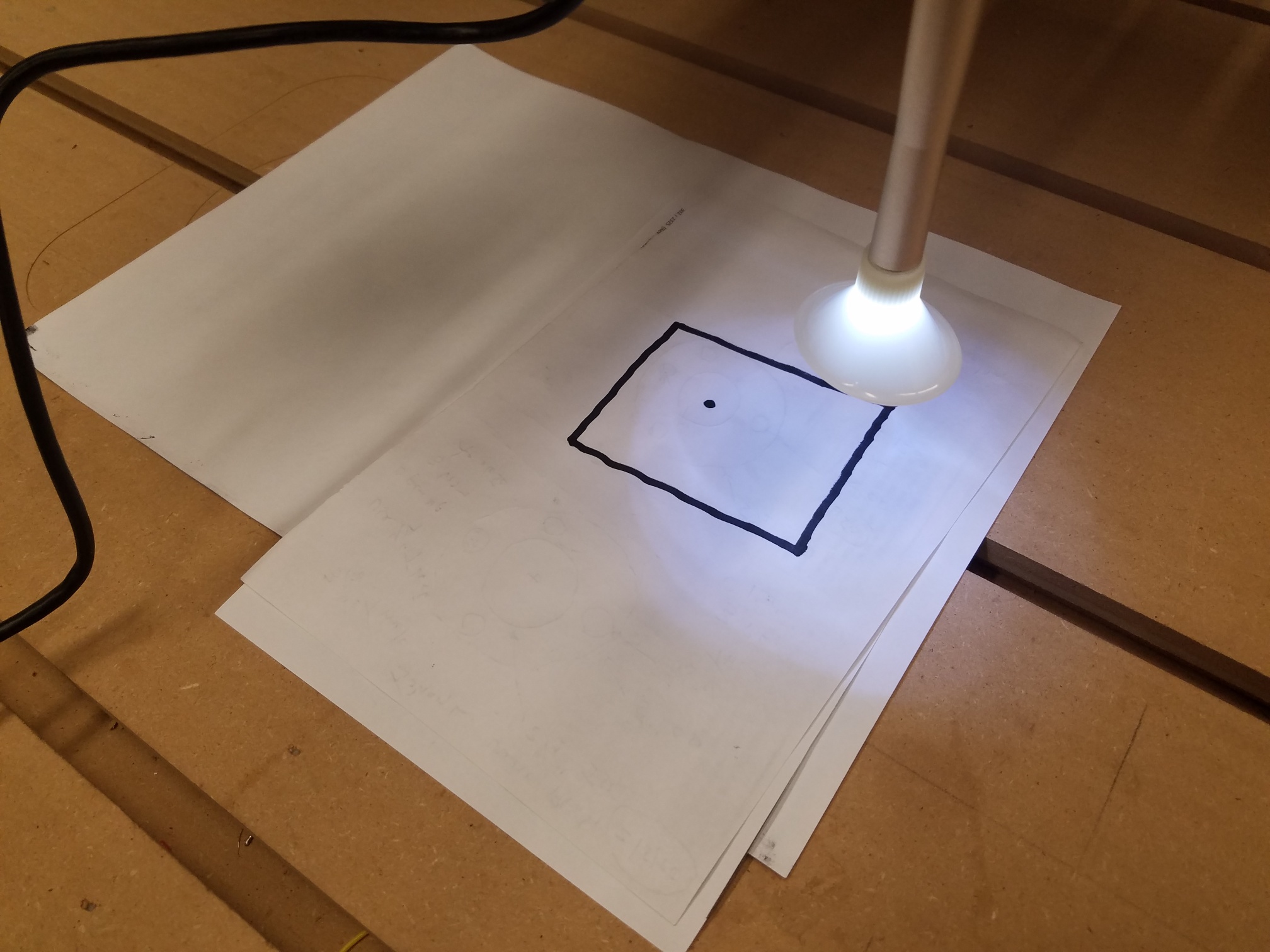
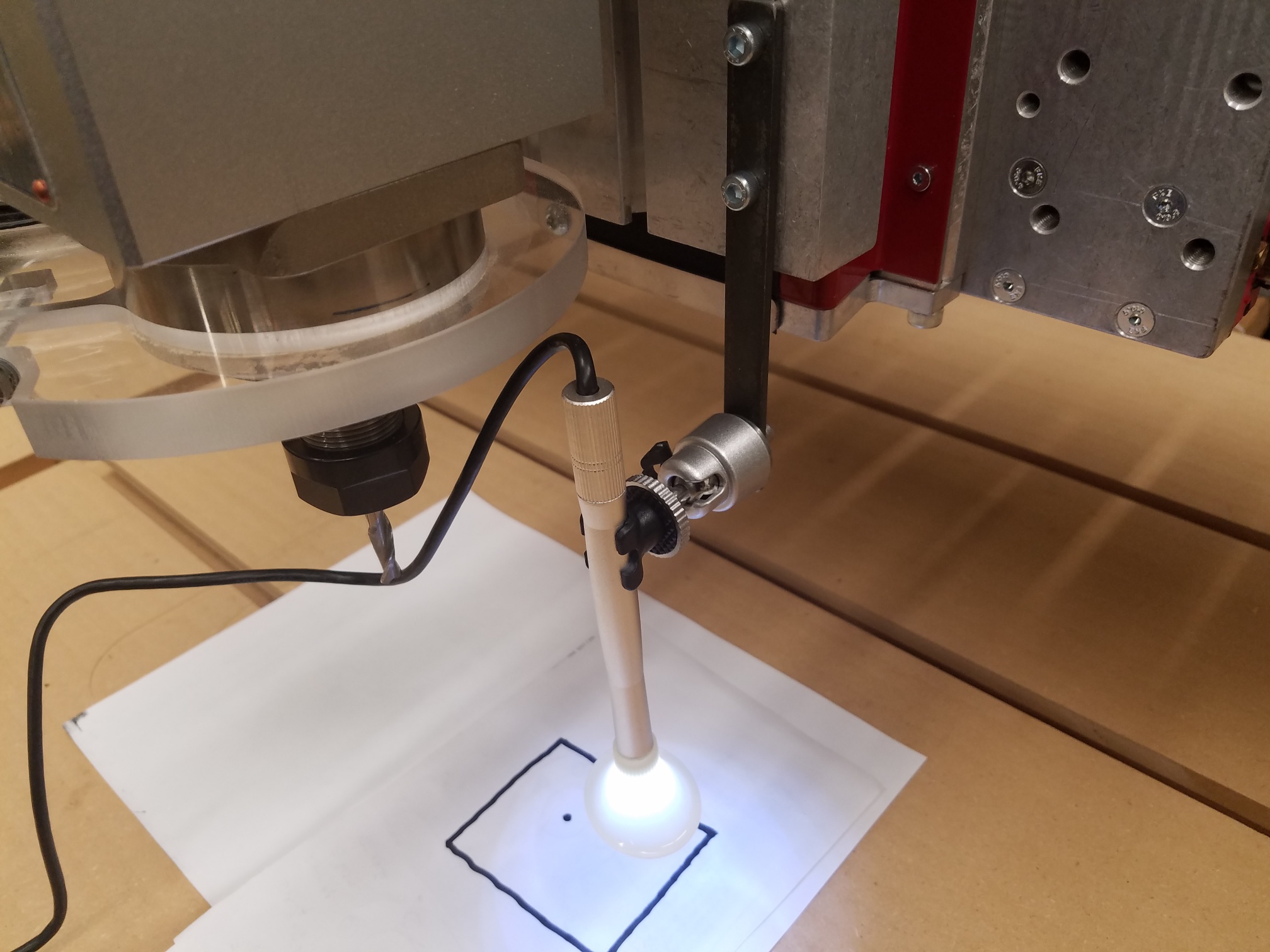
Do you have any specific recommendations as to a suitable video camera to use here?
I will appreciate any input you can provide.
Thanks,
David