Hi Les,
have been using path rules and came across a situation which requires manual intervention.
It would actually be very similar to lead ins/outs where we use properties to manually adjust individual lead ins/outs.
To cut a long story short, I needed to keep my THC turned off for some extra time when exiting a sharp internal corner. The path rule turned the THC on when coming out of the corner, so I attempted to use an Action Point to overide this. However, that didn’t work and the path rule simply turned the THC on after the Action Point had turned it off.
So would it be possible to add a new feature where we can select an individual path rule point on the drawing and disable the path rule for that particular point only.
Example, on inside corners less than 30 degrees, this is applied to every inside corner less than 30 degrees. Could I select one of those corners and disable the path rule on that corner only. Then I could replace it with an Action Point to get exactly what I need happening.
Cheers,
Keith.
That’s a tricky one. Path rules don’t easily lend themselves to individual control like that.
You can stack rules on top of each other for instance you can have one at 30 degrees and a longer one at 80 degrees. On tight corners the longer one would have priority.
Hi, I want to give you an idea that Mr Newell is hoping to take seriously and not just take it as a criticism. What I mean - in plasma cutting, height control is done by monitoring the voltage and it depends on the speed of the machine.
So the laws of physics suggest that there are places in the outline of every detail in which the THC should not be used. make a contour scanning model with OPEN CV to define the contour areas that should exclude THC. Then perhaps Mr. Newell will understand that the 2 rules created are inconvenient, contradictory and very difficult to explain. it happens automatically and depends only on inertia of the machine (that is, the distance necessary for the machine to pick up speed and to restore the speed after a delay. If it enters as a variable the interpreter can immediately mark with a different color the parts that do not include the THC.
I alway welcome suggestions. Doing what you suggest would need a very accurate knowledge of the machine’s dynamic behaviour and path planning. That would involve setting a considerable number of parameters and a lot of trial and error. While it is theoretically possible it is likely to be far harder to set up than path rules.
I’m not sure how Open CV would be used for this. Could you explain further.
In my opinion doing it in CAM is not ideal, no matter how accurately you model the machine. Disabling THC should be an automatic function of the control. For example if it slows down for a corner it should automatically disable THC until it is back up to speed. Some controls already have this functionality.
What distinguishes the machines from each other is how quickly it changes direction.If it is possible to set this with a variable that acts on the process of contour analysis we think will be good.
With Open CV, such an analysis could be most easily realized in my opinion. For example, all angles and arches, whether internal or external, that we doubt can be easily defined:
As a basis, we have introduced a variable that requires a change of direction of at least 10mm to reduce and even more to increase the village. angle or arc but arc smaller than R15 and all openings and shapes smaller than 30x30mm. These parts mark them as areas without THC.
Where the machine changes direction but this occurs in an arc with a radius greater than 15 mm, the machine will pass at a rate that we assume is 100%.
One more thing I forgot to specify - I hope Mr.Newell thinks of the “run time” function because this feature is characteristic of every CAM. However, calculating the execution time of a G code cannot happen without a proper analysis of the movement of the machine. That is, it must be predicted where the machine moves 100% and where it does not and how much it actually moves.
The change I propose would also solve this problem to a great extent
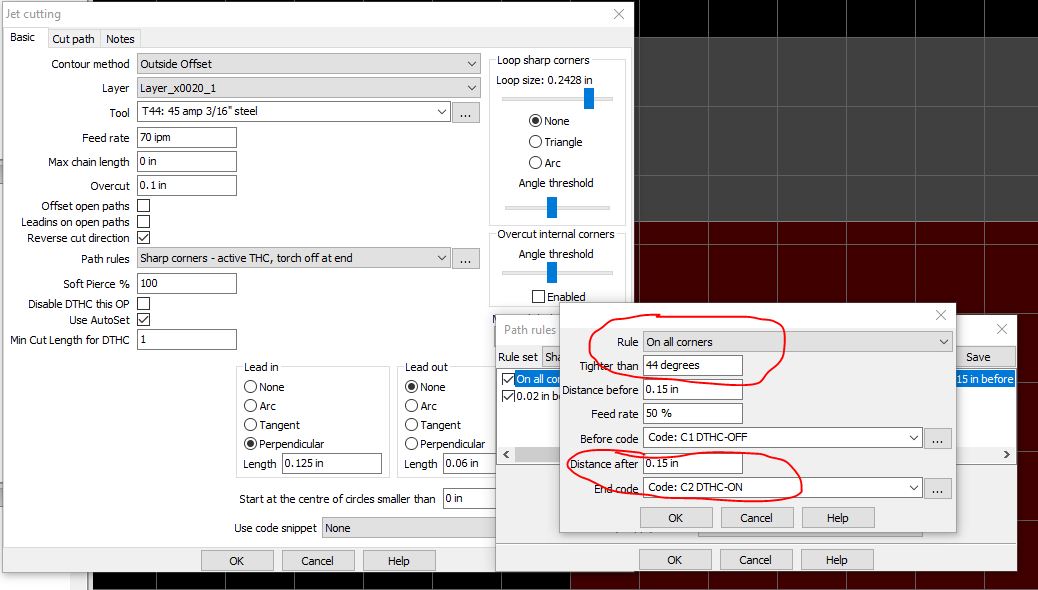
Would setting a path rule which activates within a given corner angle (say, 60-70 degrees, or whatever), and setting the at start/at end code to the longer distance, not fix the issue?
Set the criteria that start the rule at the top, and the criteria to adjust the “length of action” of the rule (for a better term) at the bottom?