]Hello, i have try to get the arc center/ midpoint coördinaten but i dont know how i can get
its for an kuka robot arm the straight lines will work but on an Circular move the robot will run away
i need to place acr midle point and arc end point the start point is where the robot is already
this i need to get
CIRC {X 50,Y 55,Z -5,A 0,B 0,C 0} , {X -5,Y 0,Z -5,A 0,B 0,C 0} C_DIS
this is what i get from sheetcam
CIRC { X -55, Y -0, Z -5.0000 } , { X -5.0000, Y 0.0000, Z -5.0000 }
this example is a half circle of 100mm wide with a tool diameter of 10mm
function OnArc()
if(arcAngle <0) then
post.Text ("CIRC {")
else
post.Text ("CIRC {")
end
local needComma = false
if(arcCentreX < 1e17) then
post.Text(" X ")
post.Number ((arcCentreX - currentX), "0.##")
needComma = true
end
if(arcCentreY < 1e17) then
if(needComma) then post.Text(",") end
post.Text(" Y ")
post.Number ((arcCentreY - currentY), "0.##")
needComma = true
end
if(endZ < 1e17) then
if(needComma) then post.Text(",") end
post.Text(" Z ")
post.Number(endZ * scale, "0.0000")
needComma = true
end
post.Text (" } , { ")
if(endX < 1e17) then
post.Text(" X ")
post.Number(endX * scale, "0.0000")
needComma = true
end
if(endY < 1e17) then
if(needComma) then post.Text(",") end
post.Text(" Y ")
post.Number(endY * scale, "0.0000")
needComma = true
end
if(endZ < 1e17) then
if(needComma) then post.Text(",") end
post.Text(" Z ")
post.Number(endZ * scale, "0.0000")
needComma = true
end
post.Text (" }\n")
post.ModalNumber ("$VEL.CP=", feedRate * scale, "0.0###\n")
post.Eol()
end
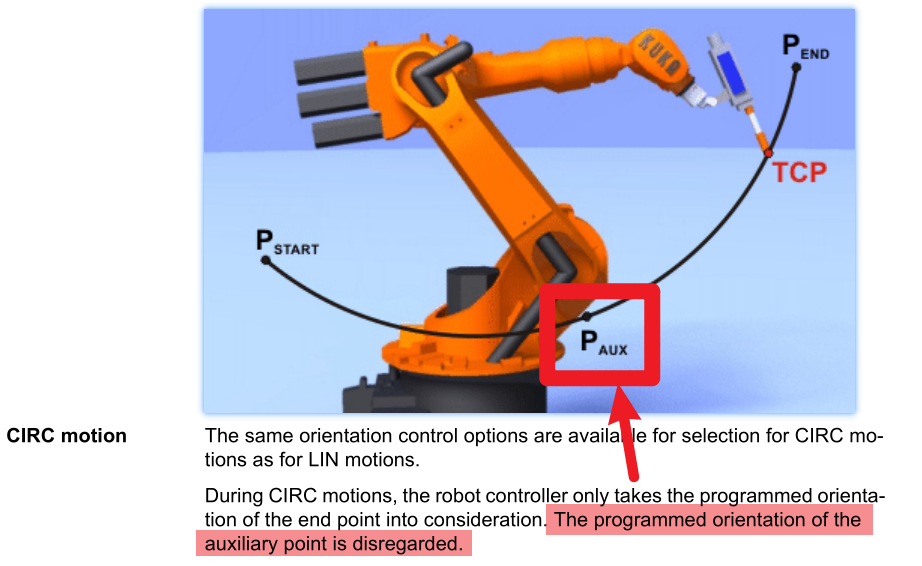
this is what the robot need to do on an Circular move
CIRC – Circular – Motion at a defined velocity and accerlation along a circular path or a portion of a circular path. This motion requires the programmer to “teach” two points, the mid-point and the end point. Using the start point of the robot (defined as the end point in the previous motion command) the robot interpolates a circular path through the mid-point and to the end point
Kuka.scpost (4.47 KB)